
足の構造をマスターする。
ここでは足に焦点を当てて、より良い足の機能と構造を解説して行きます。
足に要求される機能は
・足をコントロール出来ること
・足が地面にめり込まないこと
が要求されます。
また、足のアニメーションを考えると
・足先が独立して曲がること。
・足先を中心に足首が回転できること。
があることが望まれます。足を自在にコントロールすることはIKを使えば難しくありません。しかしめり込まないようにするには一工夫が必要になります。
では、まず足の基本的な機能の「足が地面にめり込まないこと」から考えてみましょう。
IKで足をコントロールした場合、足が地面にめり込んでしまった経験がある人は多いと思います。ではなぜ足がめり込むのでしょうか?
足のめり込みのもっとも大きな原因が
「単一のNULLでの拘束」
によることが多いようです。
LightWaveにも「ゴール回転と同期」等の機能がある為、足のコントロールをひとつのNULLで行うことも可能です。しかし、足は接地面が広い為、拘束している部分
がひとつだと先端部分で大きな誤差となって現れます。手の場合多少誤差があっても目立だちませんが、足の場合は地面があり誤差の許容範囲が非常に小くなります。この為、少
ない誤差でもめり込みという目に見える形で現れてしまいます。
これを避けるのは
「複数の部分で足の裏全体を拘束する」
ことが重要です。3つNULLを使えば完全に固定できますが、人間の足の構造と機能から、足先とかかとの二箇所を拘束することで十分でしょう。二つのNULLによって、めり込みがなく、つま先の機能を考えた骨システムを構築することが出来ます。
キャラクタの足の動きを再現するに当たって最も重要な部分がつま先です。
人間が走行をする場合、圧力の中心は親指の付け根あたりになります。ここからくるぶしまでの距離を使い衝撃を吸収しているのです。
このことからも判るように激しい動きをする場合、動きの中心はつま先にあります。
また、人間の足には指が存在し、指を動かすことで地面を把握しています。これによって通常よりも強く地面と接地することが可能になります。
これらの動きを再現するためには基本機能で挙げた
・足先が独立して曲がること。
・足先を中心に足首が回転できること。
が重要になります。この機能がないと、手でアニメーションを付けるのは非常に大変です。
これらの機能が含まれる骨の足構造は複雑で理解しにくいという問題点があります。実際にLightWaveのサンプルシーンであるAdvancedCharacterを見て、すぐに構造を理解出来る人は少ないと思います。
しかし、これを実際の機構(リンク)に置き換えて見ると、直感的に何をやっているのか判り、どのように動かせば良いかが見えるようになります。
では、実際にAcs3bとAdvancedCharacterの足の構造を機構(リンク)に置き換えて見ましょう。
このRigは
・足先で足全体が回転する。
・足先が接地した状態で、足先が独立して曲がる。
・足先を中心にした足首の回転。
などが特徴です。
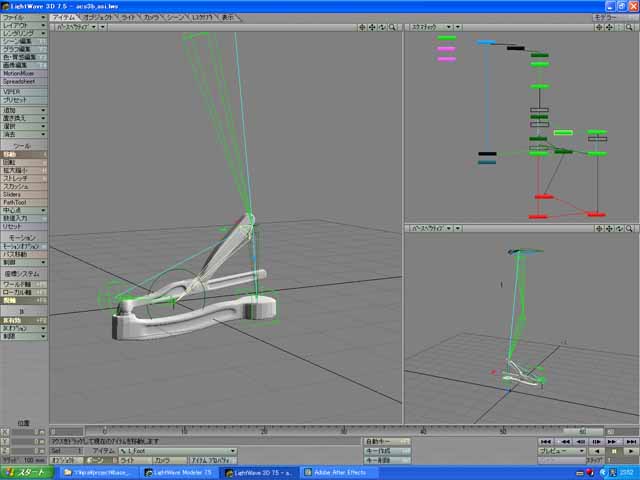 左図はAsc3bの足の構造を機構(リンク)に置き換えたものです。(クリックで拡大します。)
左図はAsc3bの足の構造を機構(リンク)に置き換えたものです。(クリックで拡大します。)
足全体はR/L_FtCtrlによってコントロールされ、このコントローラーで足の大まかな位置が決定します。
ここから腕が足先方向に伸び、足先で蝶番に接続しています。この、蝶番は足先の動きを実現しています(R/L_FtTipGoal)。
蝶番につながったトの字の部分の先に足首がつながり、これによって足先による足首の回転が実現されています。
また、トの字の\が(R/L_FtRot)独立した機構(リンク)になっている為、つま先が曲がった時に足首の位置が更新される様になります。
 左図が実際に足を動かしたときに機構(リンク)がどう動くかを概念化したものです。
左図が実際に足を動かしたときに機構(リンク)がどう動くかを概念化したものです。
あーイキナリ絵になりました。いや作るの大変で。(^_^;)>絵をクリックすると拡大します。
このRigは
・足首による膝の向きの制御
・地面にめり込まない足先
・足先を中心にした足首の回転
などが特徴です。
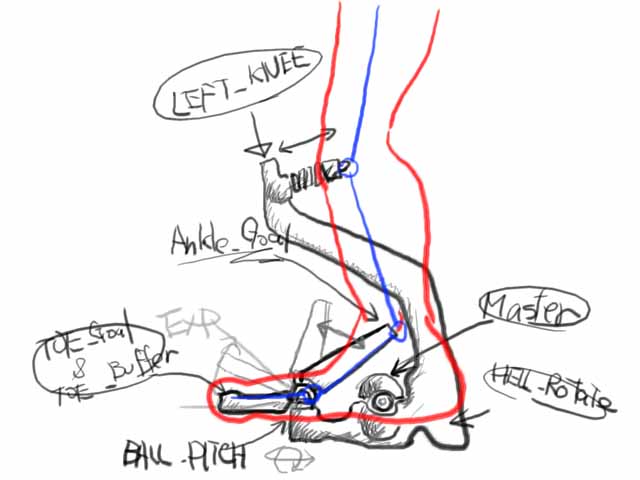 まずは膝の向きの仕組みです。MasterやHell_Rotateを回すとKNEEが連動し、膝の向きを帰ることが出来ます。実際のシーンにはMasterを動かすと腰が開くExpressionが組み込まれています。
まずは膝の向きの仕組みです。MasterやHell_Rotateを回すとKNEEが連動し、膝の向きを帰ることが出来ます。実際のシーンにはMasterを動かすと腰が開くExpressionが組み込まれています。
地面にめり込まない足先はToe_BufferとToe_Goalによって実現しています。これは足先が二重になり、Toe_buuferが動いたあと、地面にめり込んでいる分だけ調整してToe_Goalが動くような仕組みになります。
足先を中心にした足首の回転はAnkle_GoalがBall_Picthの子供なることで実現しています。
こうしてみると、それぞれの機構の持つ特徴や、定番の仕組みが理解出来ると思います。まず現実の機構(リンク)を考えてから骨を組むと、高機能なRigが作れるのです。