
丂Acs3b偵偍偗傞峉懇傪敽偆儌乕僔儑儞
丂偙偺儁乕僕偱偼丄Acs3b偱寱傗廵偲偄偭偨椉榬偑嫤挷偟偰摦偔儌乕僔儑儞偺Tips偱偡丅
丂
丂
丂擔杮搧傗僒僽儅僔儞僈儞傪帩偭偨椉榬偑嫤挷偟偰摦偔儌乕僔儑儞偼丄娙扨偦偆偵尒偊偰幚偼擄堈搙偑崅偄偱偡丅偙傟偼尰幚偺儘儃僢僩摍偱傕摨偠偱丄椉榬偑嫤挷憖嶌傪弌棃傞傕偺偑弌巒傔偨偺偼丄10擭傎偳慜偐傜偱偟偐偁傝傑偣傫丅
丂擄堈搙傪忋偘偰偄傞偺偑丄偳偪傜偺榬偑愭偵摦偔偐偲尵偆栤戣偱偡丅恖娫偺応崌偼丄偳偪傜偑庡偱偳偪傜偑廬偲偄偆偙偲偼偁傝傑偣傫丅庡廬傪椪婡墳曄偵廋惓偱偒傞偐傜偱偡丅偟偐偟丄儌乕僔儑儞晅偗偡傞偵偼丄庡廬傪寛傔偰偟傑偭偨曽偑妝偵側傝傑偡丅崱夞偼塃庤傪庡偵丄嵍庤傪廬偲偟偰儌乕僔儑儞晅偗傪偟偰偄偒傑偡丅
丂偱偼丄寱偲廵偺応崌偵暘偗偰愢柧偟偰偄偒傑偡丅
丂
 丂塃榬偲嵍榬偑嫤挷偟偰摦偐偡偺偑崲擄偱偁傞側傜偽丄偁偊偰乽壩拞偺孖傪廍偆乿昁梫偼偁傝傑偣傫丅偮傑傝丄峉懇忦審傪愝掕偟側偄偱丄栚偱偦傟偭傐偄埵抲偵帩偭偰偄偗偽椙偄偺偱偡丅
丂塃榬偲嵍榬偑嫤挷偟偰摦偐偡偺偑崲擄偱偁傞側傜偽丄偁偊偰乽壩拞偺孖傪廍偆乿昁梫偼偁傝傑偣傫丅偮傑傝丄峉懇忦審傪愝掕偟側偄偱丄栚偱偦傟偭傐偄埵抲偵帩偭偰偄偗偽椙偄偺偱偡丅
丂傎偲傫偳枅僼儗乕儉僉乕傪懪偮偙偲偵側傝傑偡偺偱旕忢偵庤娫偑妡偐傝傑偡丅斀柺丄曅庤偱儌乕僔儑儞傪晅偗傞偺偱丄旕忢偵僟僀僫儈僢僋側儌乕僔儑儞晅偗偑峴側偊傑偡丅傑偨丄偮偐傫偩傝丄偵偓偭偨傝偡傞摦嶌偑晅偗傗偡偄偺偱寚揰偽偐傝偱偼桳傝傑偣傫丅
丂嵍恾偼嵍庤偺埵抲偲夞揮傪栚偱尒偰僉乕傪懪偮偙偲偵傛傝嶌惉偟偨儌乕僔儑儞偺椺偱偡丅
丂
丂
丂
丂
 丂抁偄儌乕僔儑儞側傜偽栚偱僉乕偲懪偭偰偄偔偙偲傕壜擻偱偡偑丄挿偄僔乕儞偱偼崲擄偱偡丅偦偙偱Foller傪巊偭偰嵍庤傪峉懇偡傞僔僗僥儉傪嶌偭偰尒傑偟傚偆丅嵍恾偺僆儗儞僕怓偺晹暘偑寱偺Item偲娭楢偡傞NULL偵側傝傑偡丅
丂抁偄儌乕僔儑儞側傜偽栚偱僉乕偲懪偭偰偄偔偙偲傕壜擻偱偡偑丄挿偄僔乕儞偱偼崲擄偱偡丅偦偙偱Foller傪巊偭偰嵍庤傪峉懇偡傞僔僗僥儉傪嶌偭偰尒傑偟傚偆丅嵍恾偺僆儗儞僕怓偺晹暘偑寱偺Item偲娭楢偡傞NULL偵側傝傑偡丅
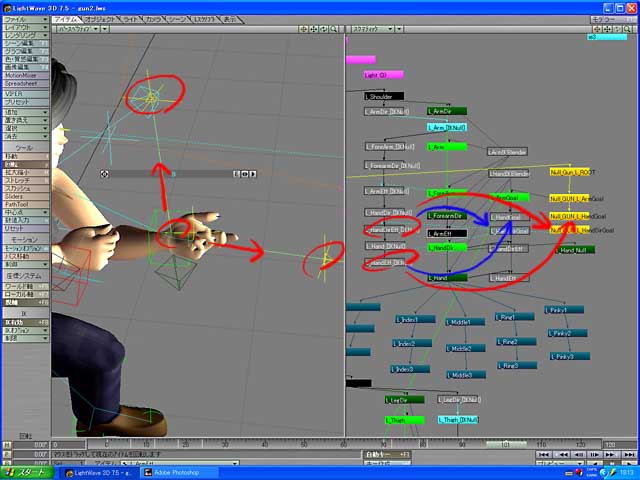
丂偙偺僔僗僥儉偱偼丄寱傪塃庤乮R_Hand乯偺巕嫙偵丄寱偺WorldPostion傪Folloer偱嵍庤僐儞僩儘乕儔乮L_ArmGoal乯偵搉偟偰偄傑偡丅偙偺偨傔丄塃庤偼FK偱丄嵍庤偼IK偱惂屼偡傞偙偲偵側傝傑偡丅偨偩偟丄嵍庤庱偺夞揮偩偗偼栚偱尒偰僉乕傪懪偭偰偄傑偡丅側偤夞揮偩偗栚偱僉乕傪懪偭偨偺偐偵偮偄偰偼壓婰偺廵偺崁栚傪嶲峫偵偟偰偔偩偝偄丅
丂傑偨丄嵍庤偼捈愙寱偲娭楢晅偗傞偺偱偼側偔偰丄NULL傪擇偮偐傑偣偰偁傝傑偡丅偙傟偼Acs3b偺庤僐儞僩儘乕儔偺埵抲偑庤庱偵偁傞堊偱偡丅寱偵懳偟偰庤庱偱屌掕偟偰偟傑偆偲丄旾偺埵抲偵戝偒側惂栺傪庴偗傑偡丅偙傟傪娚榓偡傞堄枴偱丄擇偮偺NULL傪巊偭偰丄搧偺幉傪拞怱偵偟偰庤庱偺埵抲偑墌傪昤偗傞傛偆偵偟傑偟偨丅偙偺婡峔偵傛偭偰旾偑偮偭傁偨傝丄庤庱偺偮傇傟傪嵟彫尷偵偲偳傔傞偙偲偑壜擻偵側傝傑偡丅
丂
丂
丂
丂
 丂嵍恾偼嵍庤偺埵抲傪Folloer偱夞揮傪栚偱尒偰僉乕傪懪偮偙偲偵傛傝嶌惉偟偨儌乕僔儑儞偺椺偱偡丅
丂嵍恾偼嵍庤偺埵抲傪Folloer偱夞揮傪栚偱尒偰僉乕傪懪偮偙偲偵傛傝嶌惉偟偨儌乕僔儑儞偺椺偱偡丅
丂
丂
丂
丂
丂
丂
丂
 丂丂偁傑傝怳傝夞偡儌乕僔儑儞偑彮側偄偺偱丄寱傛傝娙扨偵尒偊傞廵偱偡偑埲奜側棊偲偟寠偑偁傝傑偡丅
偦傟偼丄偙偆偄偭偨僞僀僾偺帩偪曽偩偲僕儞僶儖儘僢僋偑敪惗偟傗偡偺偱偡丅
丂丂偁傑傝怳傝夞偡儌乕僔儑儞偑彮側偄偺偱丄寱傛傝娙扨偵尒偊傞廵偱偡偑埲奜側棊偲偟寠偑偁傝傑偡丅
偦傟偼丄偙偆偄偭偨僞僀僾偺帩偪曽偩偲僕儞僶儖儘僢僋偑敪惗偟傗偡偺偱偡丅
丂ACS3b偺応崌丄庤偺傂傜傪壓岦偒偵儌僨儕儞僌偟傑偡丅偲偙傠偑廵傪帩偮偲偒偼 庤偺傂傜偑忋岦偒偵側傝傑偡丅偙偺堊丄弶婜忬懺偱偡偱偵180亱傂偭偔傝婣偭偨忬懺偱儌乕僔儑儞晅偗傪峴側傢側偔偰偼側傝傑偣傫丅LightWave7.5偱偼丄恊幉丄儘乕僇儖幉 丄儚乕儖僪幉偱憖嶌偼壜擻偱偡偑丄撪晹張棟偼恊幉偺傑傑側偺偱僕儞僶儖儘僢僋 偵傛傞儌乕僔儑儞偺晄搒崌偑婲偙傝傗偡偄偺偱偡丅
丂傑偨丄180亱傂偭偔傝曉偭偰偄傞偺偱庤庱偑戝偒偔乽偹偠傟乿偰偄傑偡丅偙傟偵傛傝丄庤庱偺偮傇傟偑敪惗偟僋僆儕僥傿偵傕栤戣偑婲偒傑偡丅
丂
丂
 丂偙傟傪旔偗傞堦斣庤偭庢傝憗偄懳張曽偼丄廵偺僨僓僀儞傪曄偊傞偲偄偆曽朄偱偡丅嵍恾偺條偵偹偠傟偑婲偒偵偔偄僞僀僾偵偡傟偽儌乕僔儑儞晅偗偑旕忢偵僗儉乕僘偵側傝傑偡丅
丂偙傟傪旔偗傞堦斣庤偭庢傝憗偄懳張曽偼丄廵偺僨僓僀儞傪曄偊傞偲偄偆曽朄偱偡丅嵍恾偺條偵偹偠傟偑婲偒偵偔偄僞僀僾偵偡傟偽儌乕僔儑儞晅偗偑旕忢偵僗儉乕僘偵側傝傑偡丅
丂偙偩傢傝偺僔乕儞 偱側偐偭偨傝暔岅忋栤戣偑側偗傟偽峫椂偡傋偒曽朄偩偲巚偄傑偡丅
丂
丂
丂
丂
丂
丂偲偼偄偊丄1恖偱嶌偭偰偄傞応崌側傜偲傕偐偔丄僠乕儉偱嶌偭偰傞応崌偼僨僓僀儞偺曄峏偼擣傔傜傟側偄応崌傕懡偄(偲偄偆傛傝傎偲傫偳柍棟)偱偡丅
丂偙偺傛偆側儌乕僔儑儞晅偗傪峴側偆偨傔偵偼嵍庤偺埵抲偲夞揮傪峉懇偟丄嵍庤傪IK偱摦偐偡昁梫偑偁傝傑偡丅偟偐偟丄扨弮偵foller傪巊偭偰傕偆傑偔峴偒傑偣傫丅偙傟偼庤庱偺僔僗僥儉偑IK傪 巊偭偰偄傞偨傔偱偡丅 偙偺僔乕儞偼
丂塃庤FK
丂丂伀
丂丂廵
丂丂伀 丂
丂folloer
丂丂伀 丂
丂 嵍庤Controler
丂丂伀 丂
丂嵍庤IK
偺弴彉偱寁嶼偝傟傑偡丅偙偺弴彉偩偲丄foller偱愝掕偟偨Rotaion抣偼IK偵傛偭偰忋彂偒偝傟偰偟傑偄傑偡丅偙偺堊丄夞揮偑捛悘偟側偄偺偱偡丅暋悢偺foller傗Expression傪捛壛偡傞懳墳偼弌棃傑偡偑丄僔僗僥儉偑暋嶨偵側偭偰偟傑偄傑偡丅 偦偙偱丄崱夞偼敪憐傪揮姺偟丄嵍庤IK傪捈愙廵偱摦偐偡條偵僾僠夵憿偡傞偙偲偱懳墳偟傑偡丅
 丂乮嵍恾偼僋儕僢僋偡傞偲奼戝偱偒傑偡丅栠傞応崌偼僽儔僂僓偺儃僞儞偱栠偭偰偔偩偝偄丅乯
丂乮嵍恾偼僋儕僢僋偡傞偲奼戝偱偒傑偡丅栠傞応崌偼僽儔僂僓偺儃僞儞偱栠偭偰偔偩偝偄丅乯
丂Acs3b偱偼丄庤乮R/L_ArmGoal乯偺夞揮傪R/L_HandGoal偲R/L_HandDirGoal傪巊偭偰屌掕偟傑偡丅 R/L_HandGoal偼庤偺愭抂晹傪丄R/L_HandDirGoal偼庤偺傂傜偺曽岦傪岦偔傛偆偵側偭偰偄傑偡丅 偙傟偵傛偭偰R/L_ArmGoal偺X幉偲Z幉傪寛掕偟傑偡丅
丂丂崱夞偺僾僠夵憿偱偼廵偺巕嫙偵忋婰偺僔僗僥儉偲摨偠NULL奒憌傪嶌傝丄IK偺僑乕儖僆僽僕僃僋僩傪 廵偺巕嫙偵側傞傛偆偵廋惓偟傑偟偨丅乮恾嶲徠乯 偙傟偱丄嵍IK偼廵偵懳偟偰堦掕偺妏搙傪庢傞條偵偡傞偙偲偑弌棃傑偟偨丅
丂
丂
丂
丂
 傕偆傂偲偮拲堄偡傋偒側偺偑庤庱偺岦偒偱偡丅忋婰偺捠傝丄嵍庤庱偼旕忢偵偮傇傟傗偡偔側偭偰偄傑偡丅偙偺偨傔庤傗巜偺宍傪岺晇偟偰弶婜忬懺偺偹偠傟傪梷偊偰偍偔偙偲偑廳梫偵側傝傑偡丅
傕偆傂偲偮拲堄偡傋偒側偺偑庤庱偺岦偒偱偡丅忋婰偺捠傝丄嵍庤庱偼旕忢偵偮傇傟傗偡偔側偭偰偄傑偡丅偙偺偨傔庤傗巜偺宍傪岺晇偟偰弶婜忬懺偺偹偠傟傪梷偊偰偍偔偙偲偑廳梫偵側傝傑偡丅
丂恖娫偑廵傪帩偮応崌傕丄忋婰偺椺偺傛偆偵捦傫偱偄傞栿偱偼側偔丄嵍恾偺傛偆偵攃埇偟偰偄傑偡丅偙偆偡傞偙偲偵傛偭偰丄偹偠傟傗傂偹傝偑嵟彫尷偵側傞傛偆偵偟偰偄傞偺偱偡丅
丂
丂
丂
丂
丂
丂
 偙傟傜偺偙偲傪峫椂偟偰嶌傜傟偨廵偺儌乕僔儑儞傪埲壓偵帵偟傑偡丅
偙傟傜偺偙偲傪峫椂偟偰嶌傜傟偨廵偺儌乕僔儑儞傪埲壓偵帵偟傑偡丅
丂
丂
丂
丂
丂
丂
丂
丂崱夞偼寱傗廵偲偄偭偨椉庤偑嫤挷偟偰摦偔儌乕僔儑儞偵懳偟偰峫嶡偟傑偟偨丅崪傪廋惓偲foller偵傛偭偰丄塃庤偺儌乕僔儑儞晅偗偱嵍庤傪僐儞僩儘乕儖偡傞曽朄傪嫇偘偰偄傑偡丅
丂偟偐偟丄忋婰偺條側曽朄傪偲偭偰傕偹偠傟傗儌乕僔儑儞偺攋抅偑婲偒側偄栿偱偼偁傝傑偣傫丅偙偺傛偆側僔乕儞傪嶌惉偡傞応崌偼帠慜偵擖擮側僥僗僩傪峴側偆昁梫偑偁傝傑偡丅偦偺寢壥丅昁梫偑偁傟偽儌僨儖偺曄峏傗丄崪偺廋惓傕峫椂偡傋偒偱偡丅
丂乽廵傗寱偺儌乕僔儑儞晅偗偼寢峔戝曄乿偱偁傞偙偲傪妎偊偰偍偄偨曽偑椙偄偱偟傚偆丅
丂
丂廵傗寱傪巊偭偨儌乕僔儑儞偱偼塃庤傪FK偱丄嵍庤傪IK偱摦偐偡応崌偑懡偄偱偡丅塃庤偼嵟廔揑側 儌乕僔儑儞帪偵FK偱摦偗偽椙偄偺偱丄億乕僘晅偗偺帪偼愊嬌揑偵IK傪巊偭偰峴偒傑偟傚偆丅塃庤偺億乕僘偑 姰帏偵側偭偨傜Acs3bIKtoFK傪幚峴偟傑偡丅偙傟偵傛偭偰塃庤FK偺LocalRotaion偲塃庤IK偺抣偑堦抳偟傑偡丅 偙傟偱嵍庤偺曽傕惓妋側埵抲偵堏摦偟傑偡丅
丂塃庤傪IK偱Pose晅偗->IKtoFK傪幚峴->塃庤偵FK偑從偒偙傑傟傞->嵍庤偺IK偑惓妋側埵抲偵廋惓偝傟傞丅
丂偲偄偆偙偲偵側傝傑偡丅 儌乕僔儑儞偺妋擣帪偵塃庤傪FK惂屼偵偟偰偍偔偺傪偍朰傟側偔 (^ -^)b
丂