RightHand 「R_FtRot」をFKの位置に移動します。
RightHand 「R_FtRot」をFKの位置に移動します。
UseRHandIK 手首の回転角から「R_FtRot」のRotationを計算します。
LefttHand 「L_FtRot」をFKの位置に移動します。
UseLHandIK 手首の回転角から「L_FtRot」のRotationを計算します。
RightFoot 「R_FtCtrl」をFKの位置に移動します。
R Foot Rotation 足首と足先の位置から「R_FtCtrl」のRotationを計算します。 (注意1)
LeftFoot 「L_FtCtrl」をFKの位置に移動します。
L Foot Rotation 足首と足先の位置から「L_FtCtrl」のRotationを計算します。(注意1)
Offset H Angle R/L_FtCtrlのHeading回転を加算します。(注意2)
注意1) 現在、R/L_FtCtrlの再計算が正確に行なえない場合があります。(R/L_FtRotを動かした場合など)
注意2) R/L_FtCtrlの計算は足首と足先の位置から算出しています。初期状態でこの位置関係が水平になっていないと正確な計算が行なえません。この場合はOffset H Angleの値を加算することで対応してください。
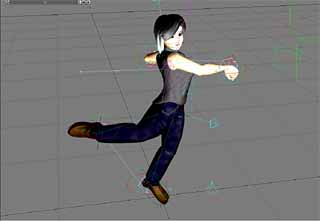
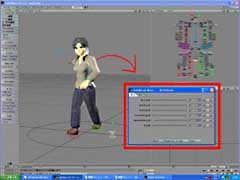
以下にFKtoIKの実行例を示します。コントローラの位置確認してください。
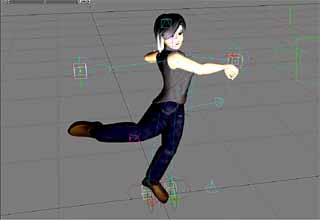 ->
->